 +7 (926) 623-17-00
+7 (926) 623-17-00
R8
Цветное облако точек и высокая детализация
Точная фиксация формы и размеров объектов

Три модели на выбор
R8-16
16 каналов
120 метров
320 000 тчк/с
R8-32
32 канала
120 метров
640 000 тчк/с
R8-300
32 канала
300 метров
640 000 тчк/с
Общие характеристики
Все
Спутниковые сигналы
1 см
Относительная точность
2 см
Точность повторяемости
40 ± 2 дБ
Усиление антенны RTK
1.8 / 2.5 см
Абсолютная точность (план/высота)
0.015 °
Ошибка горизонтальной точности
6К
Панорамные изображения
1 см
Шум облака без фильтрации
0.015 °
Ошибка вертикальной точности
Дальность измерения 120 м / 300 м
R8 позволяет измерять расстояние до 300 м, что дает возможность захватывать большие объекты.


Точность повторяемости
R8 соответствует критерию 5A геодезической и картографической съемки, результат определения точек уникален, точность повторяемости в пределах 2 см.

Вдвое выше результаты точности повторяемости по сравнению с другими мобильными сканерами

В два раза выше точность повторяемости R8
*Синие облака точек отличаются от зеленых облаков точек для одной и той же сцены сканирования, выполненной разными людьми, устройствами, временем и маршрутами.
Точность съемки и картографирования соответствует масштабу 1:500
R8 создает облако точек в координатах WGS84, которые являются точными по горизонтали и вертикали. Погрешность точности по горизонтали и вертикали находится в пределах 0,015°.

Горизонтальная точность других мобильных сканеров

Вертикальная точность других мобильных сканеров

Точность R8 по горизонтали

Точность R8 по вертикали
*Исходные облака точек, полученные без корректировки угла наклона
Отчёт о точности
R8 генерирует отчет о точности, который предоставляет MVAD (среднее значение абсолютного отклонения) облаков точек для каждого сканирования и 3D тепловую карту точности облаков точек
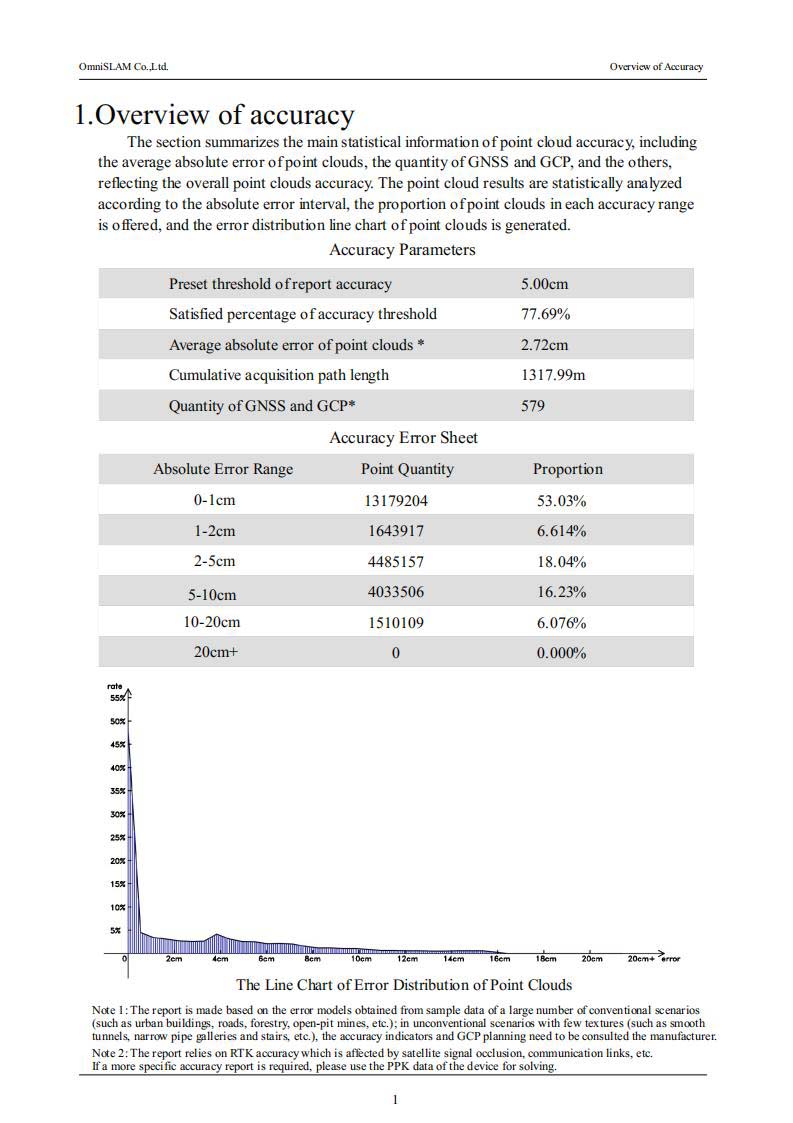
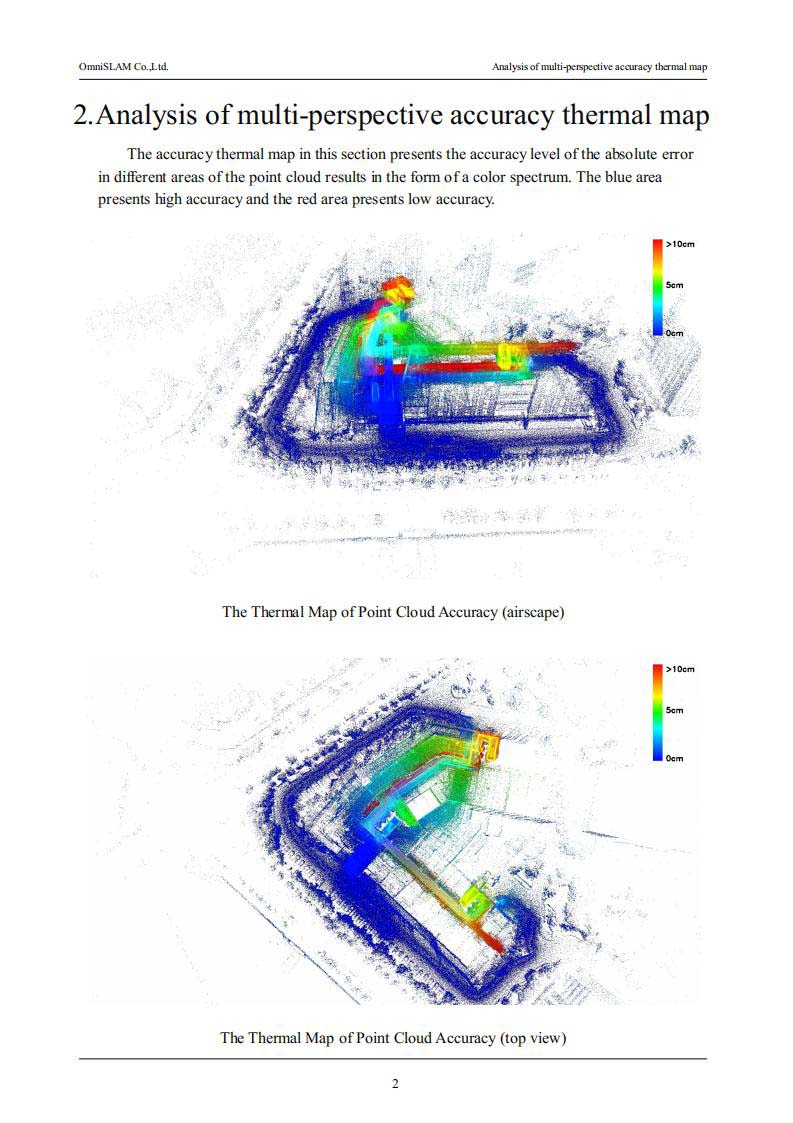

Тепловая карта точности облака точек
R8 предоставляет данные облака точек в виде тепловой карты точности (формат LAS) для возможности многоразовой проверки достоверности данных облака точек.
")
Тепловая карта облака точек (формат LAS. Вид со стороны)
")
Тепловая карта облака точек (формат LAS. Вид сверху)
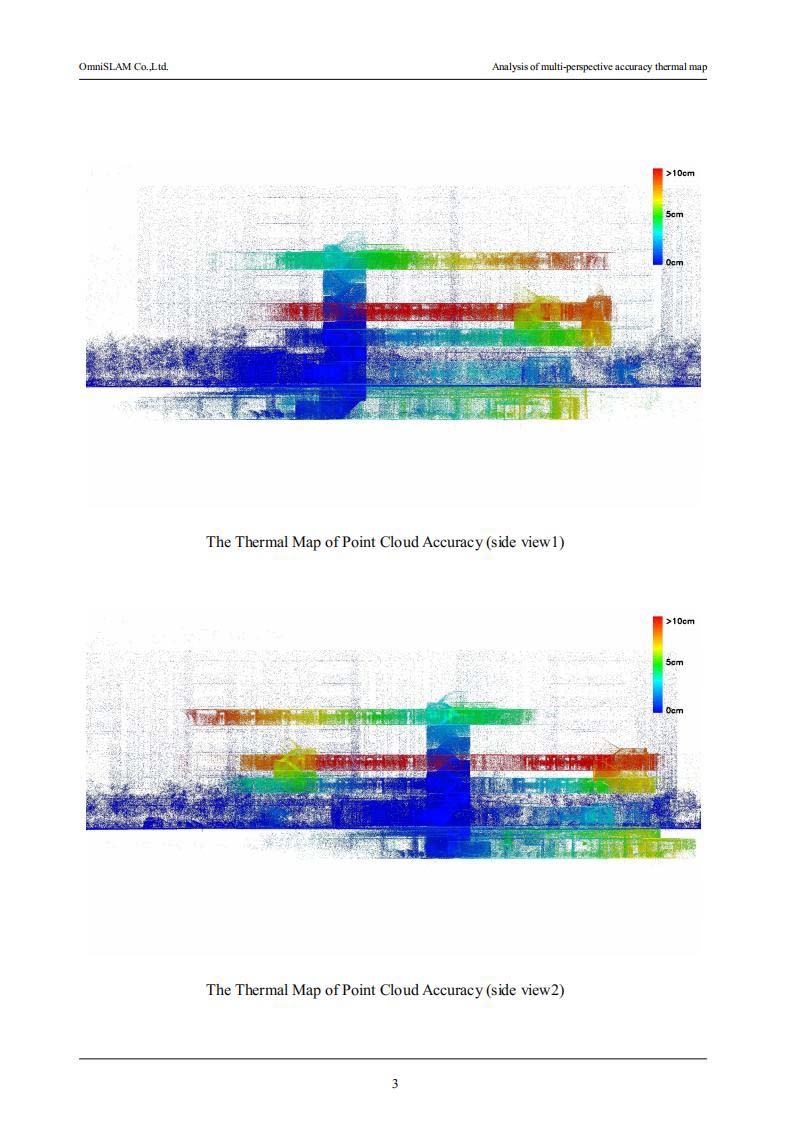
")
Тепловая карта облака точек (формат LAS. Вид сбоку)
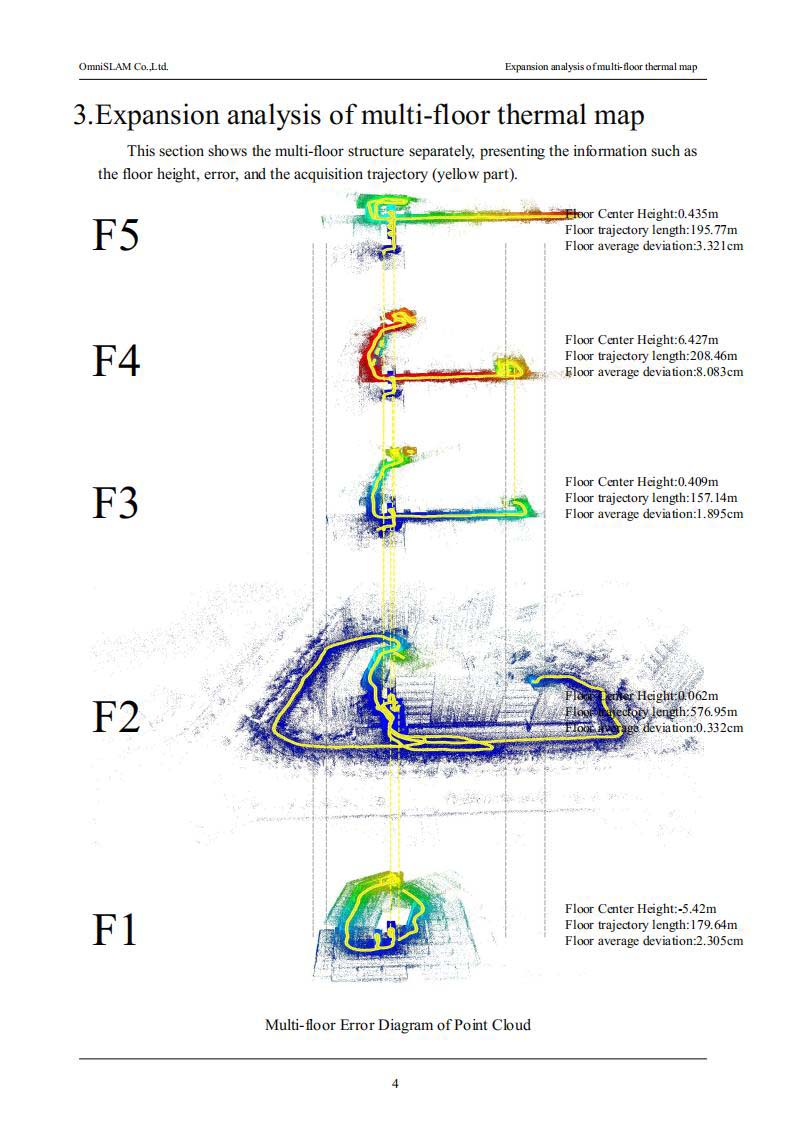
Инструкция по установке GCP
Мобильный цветной 3D лазерный сканер SLAM OmniSLAM генерирует инструкции по вставке точек привязки. * Для облаков точек с неудовлетворительной точностью определенного сканирования программа предложит количество и положение точек привязки для эффективной генерации.
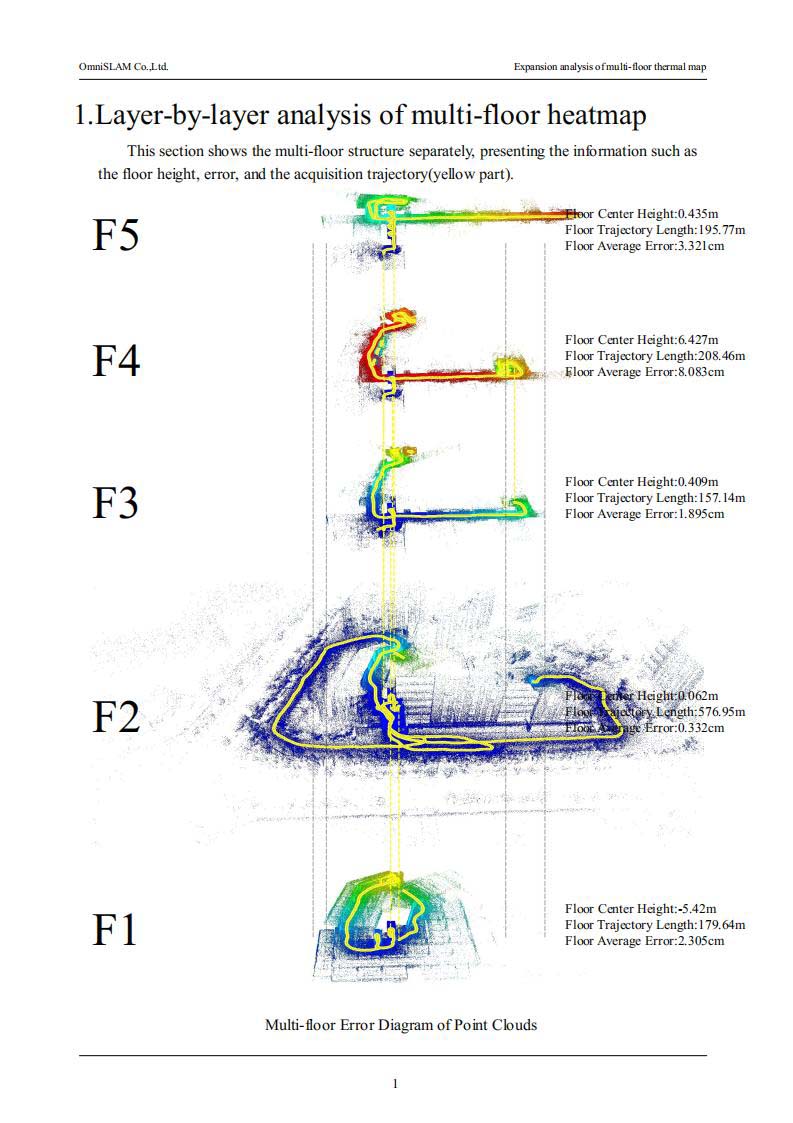
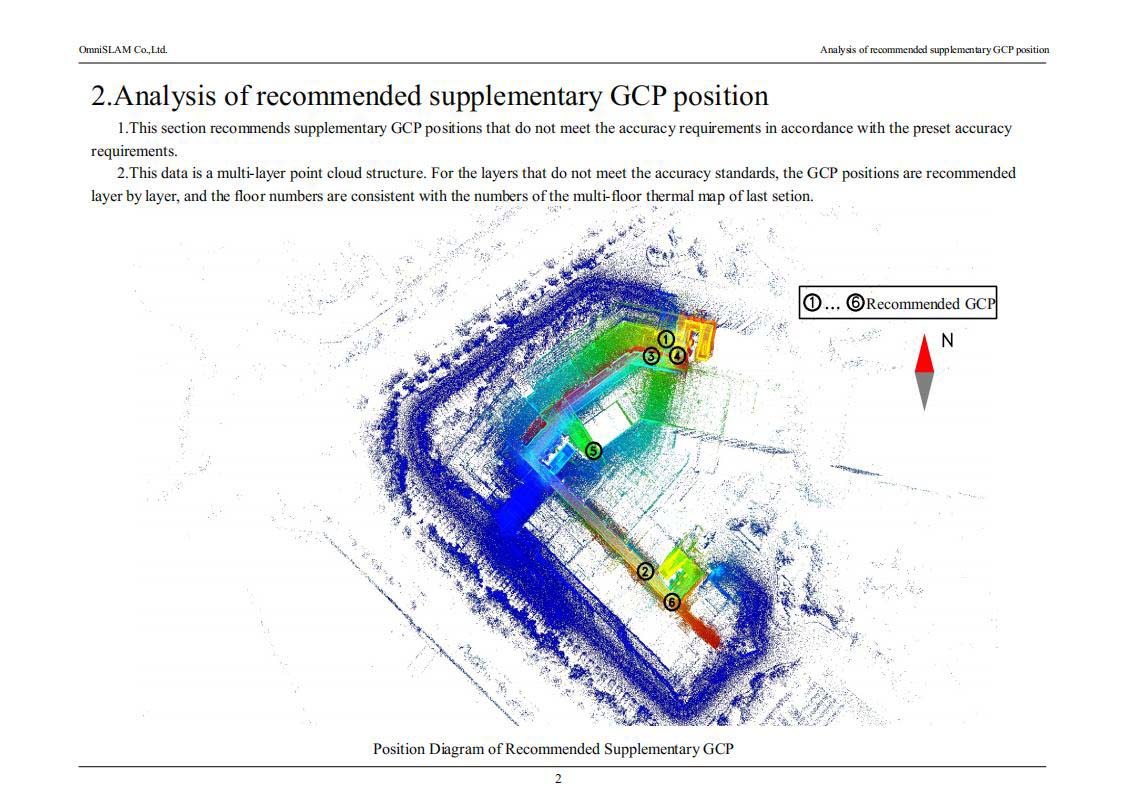
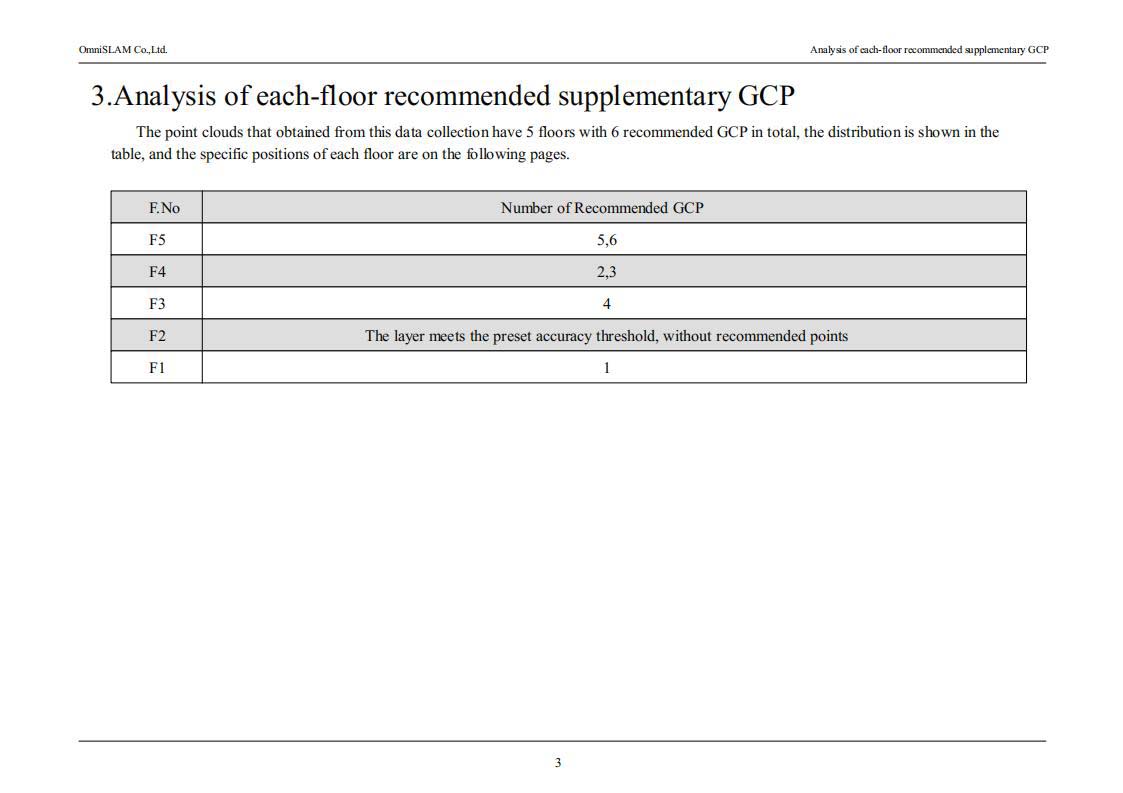
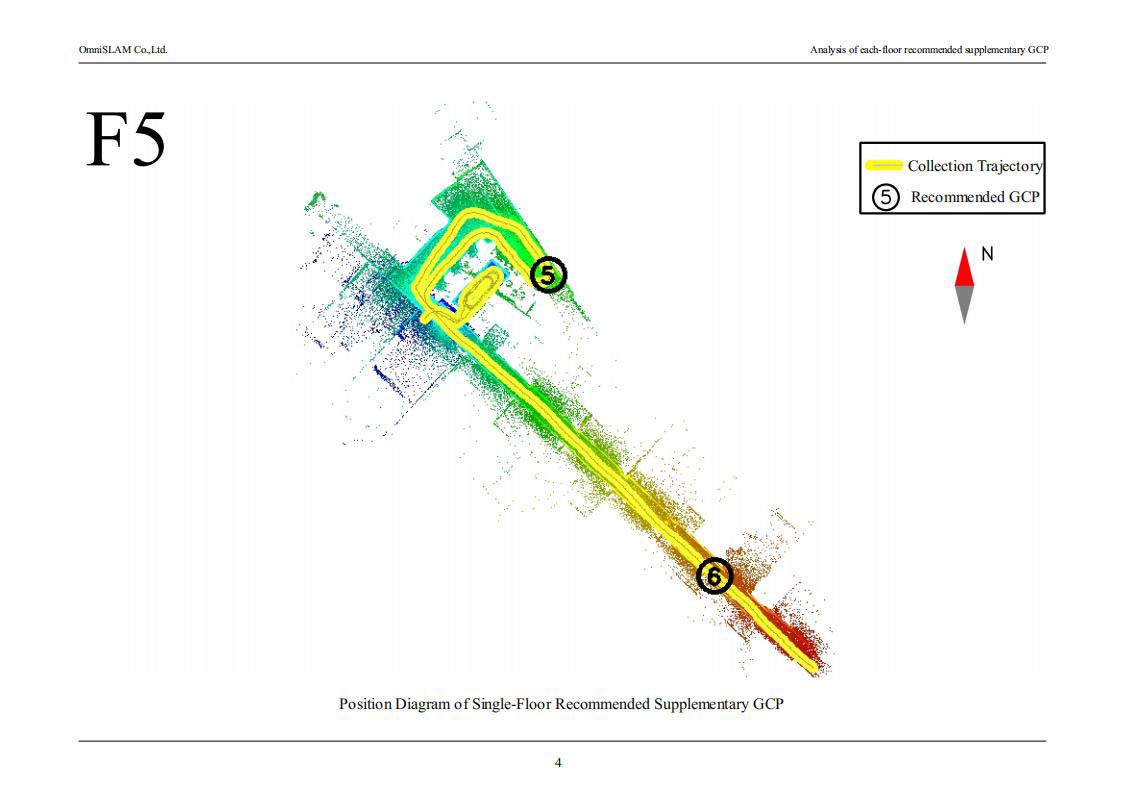
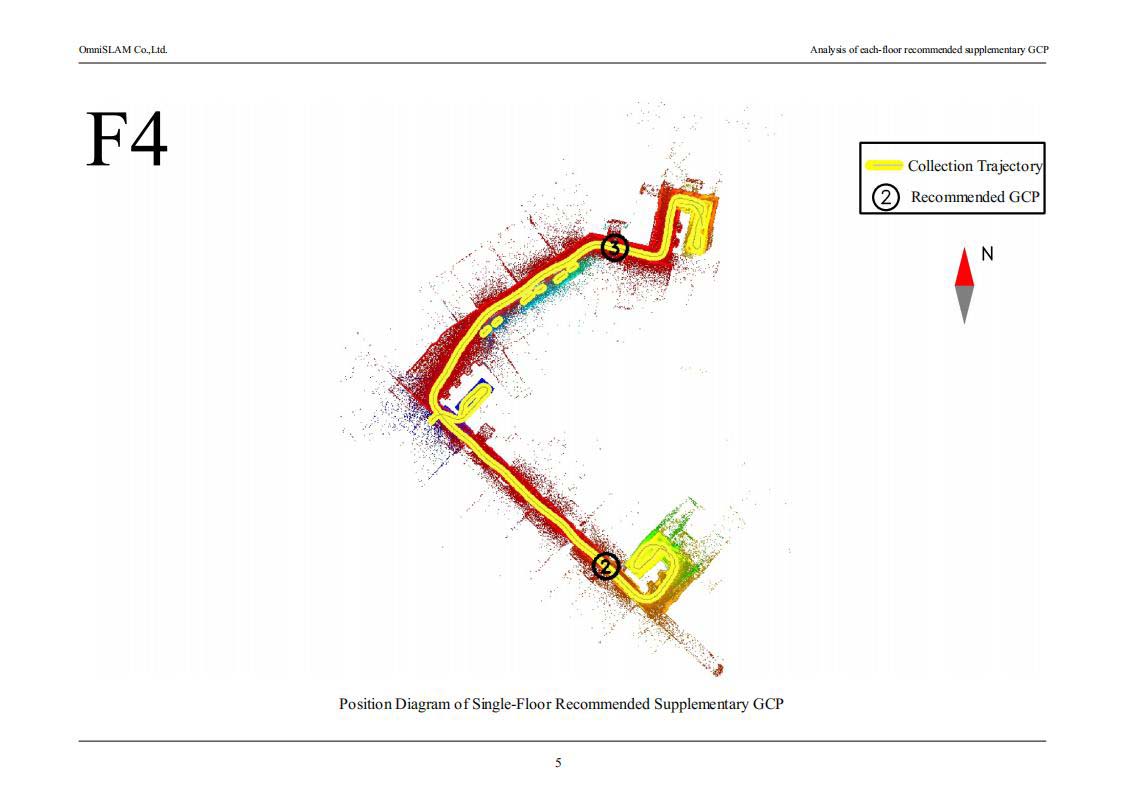

Анализ вставки GCP
Если точность облака точек неудовлетворительна, получение достоверных результатов базируется на рекомендуемом положении и количестве данных «Анализа вставки GCP».

Удаление движущихся объектов
R8 поддерживает функцию очистки облака точек, которая позволяет автоматически удалять движущиеся объекты




Одиночное сканирование без ограничения по времени и расстоянию
R8 не ограничен временем и расстоянием для одиночного сканирования при использовании наиболее эффективного способа
Детальная прорисовка облаков точек
R8 получает толщину нефильтрованного облака точек в 1 см с реальными краями и четким текстом






Вертикальное расположение панорамной камеры
Панорамная камера R8 расположена вертикально, использует 2 объектива Leica для фронтального сканирования, а также 2 сенсора изображения с 1-дюймовым CMOS, что позволяет получать панорамные изображения с разрешением 6K и 360°.

Технология онлайн-колоризации LIO-PANO® с многомодельным объединением данных лидара и панорамной камеры
Точное слияние облака точек с истинным цветом и интенсивностью отраженного лазерного излучения


Цветное облако точек в полном разрешении
Облако точек истинного цвета в режиме полного отображения с помощью Photo Level, извлечение и построение графика с помощью Part Level
