Точек в проекте
Площадь объекта
Время в поле
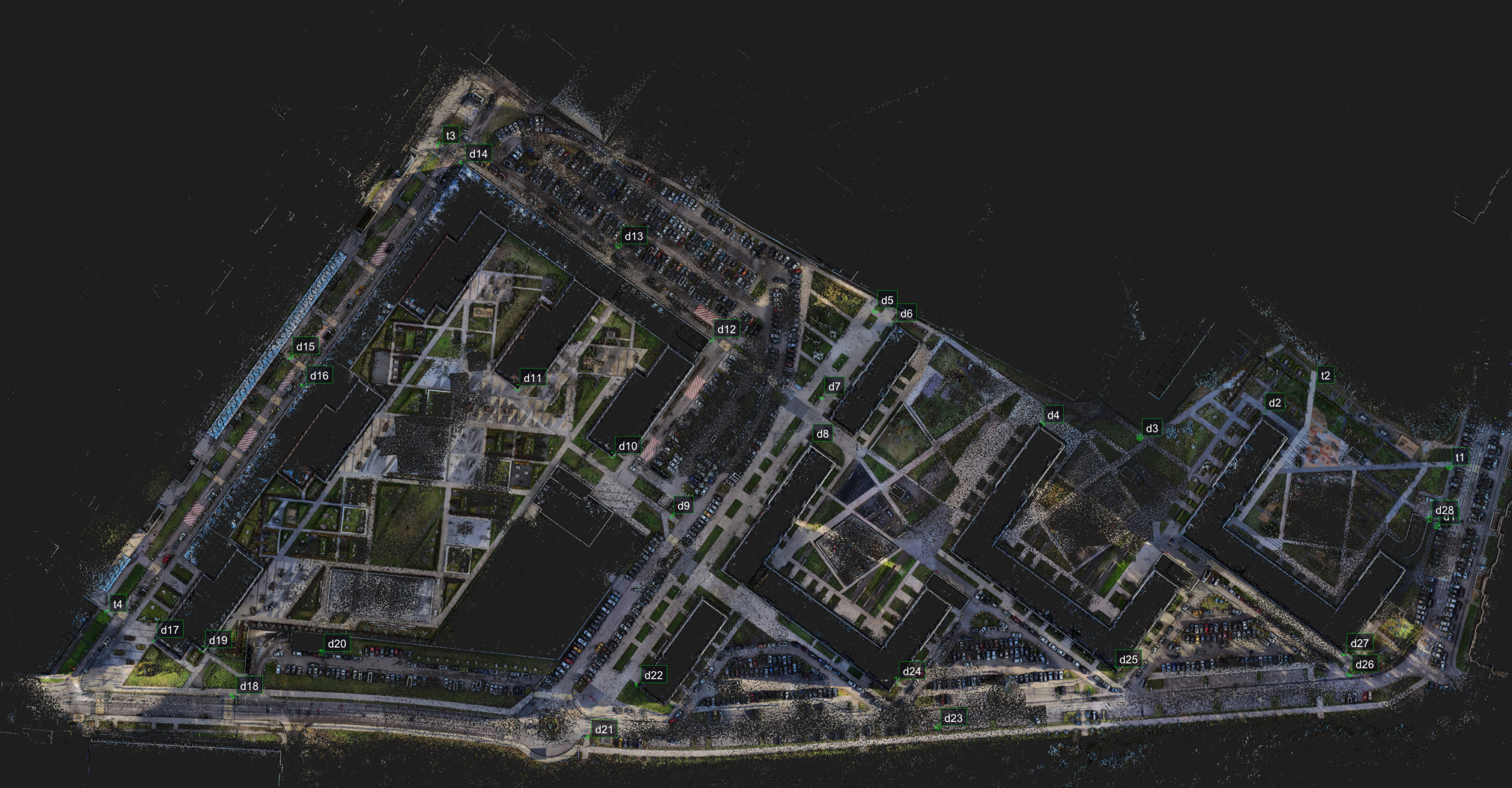
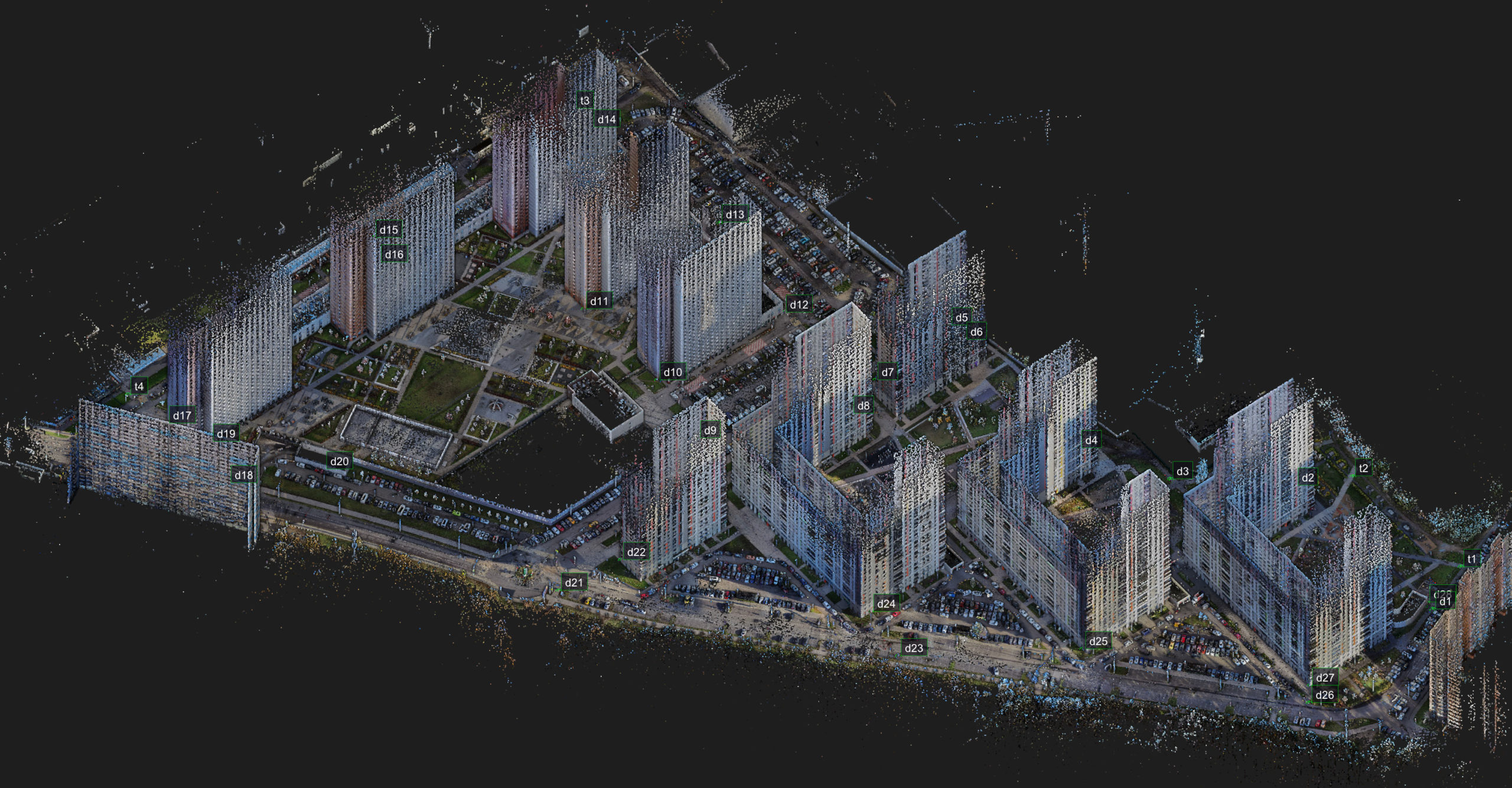
Только SLAM и опорные точки
На территории объекта отсутствовала возможность приёма сигнала GNSS. Весь объект был сделан только по SLAM, без GNSS. 17 Га за 5 часов полевых работ одним человеком
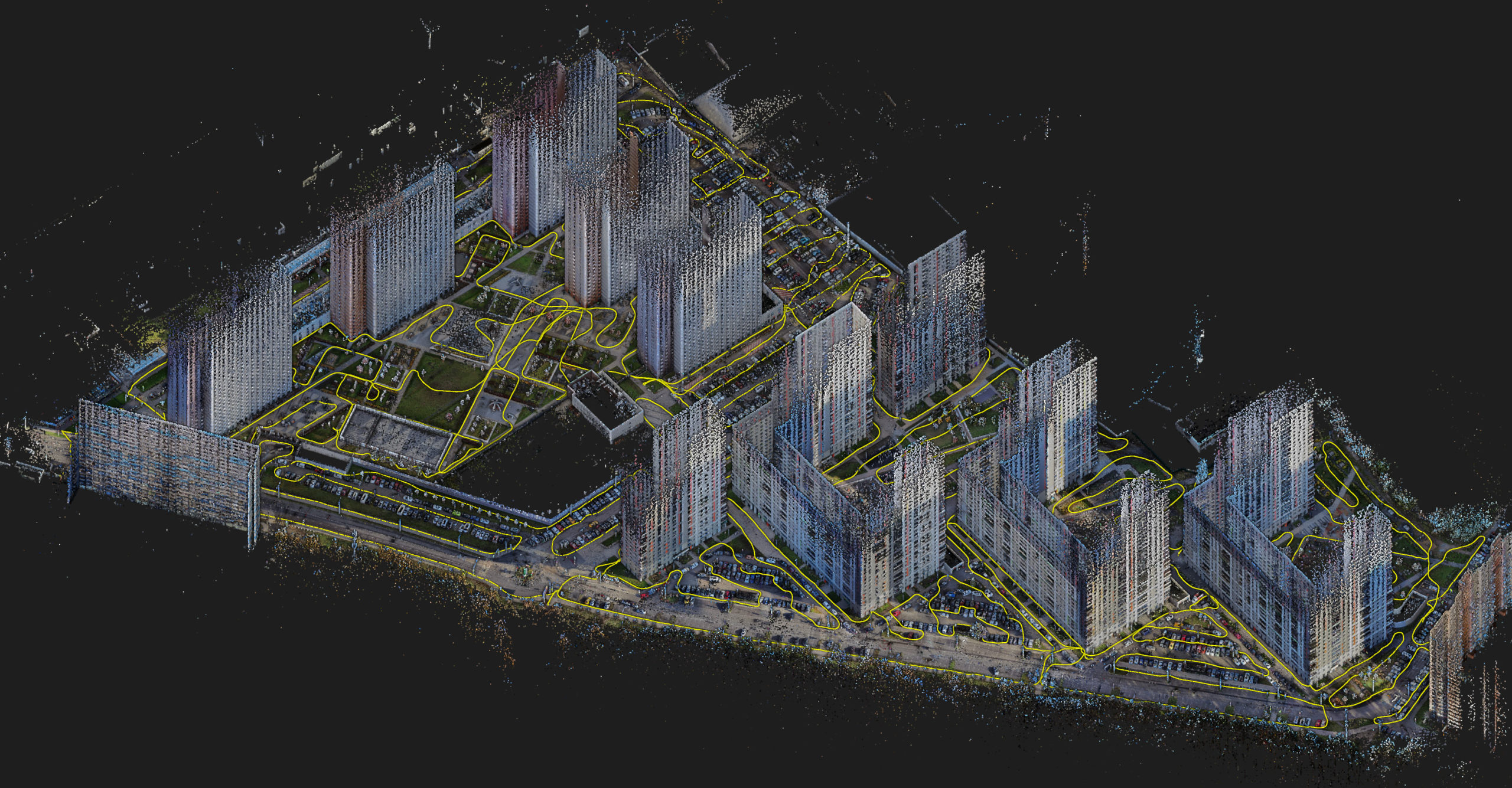
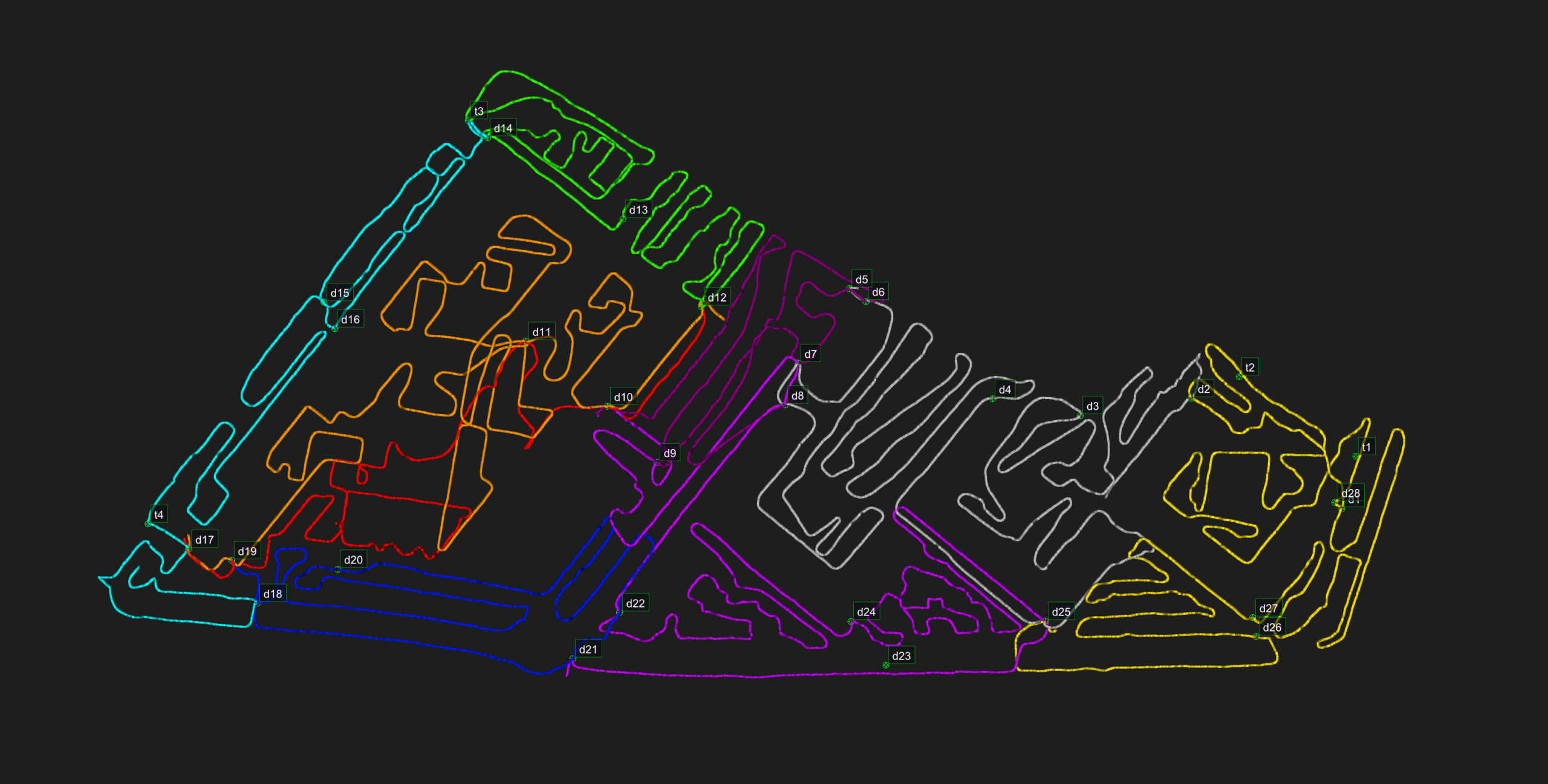
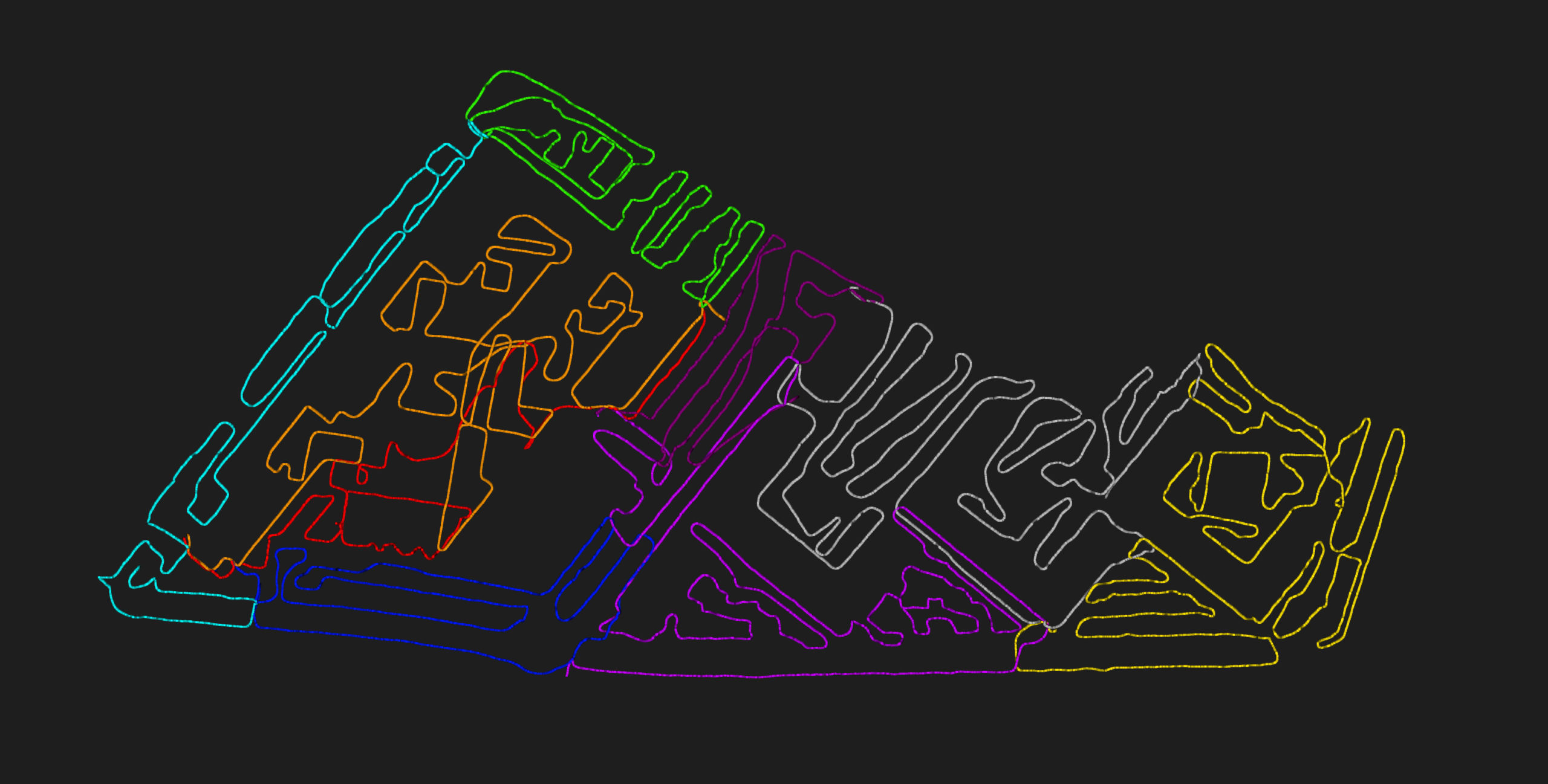
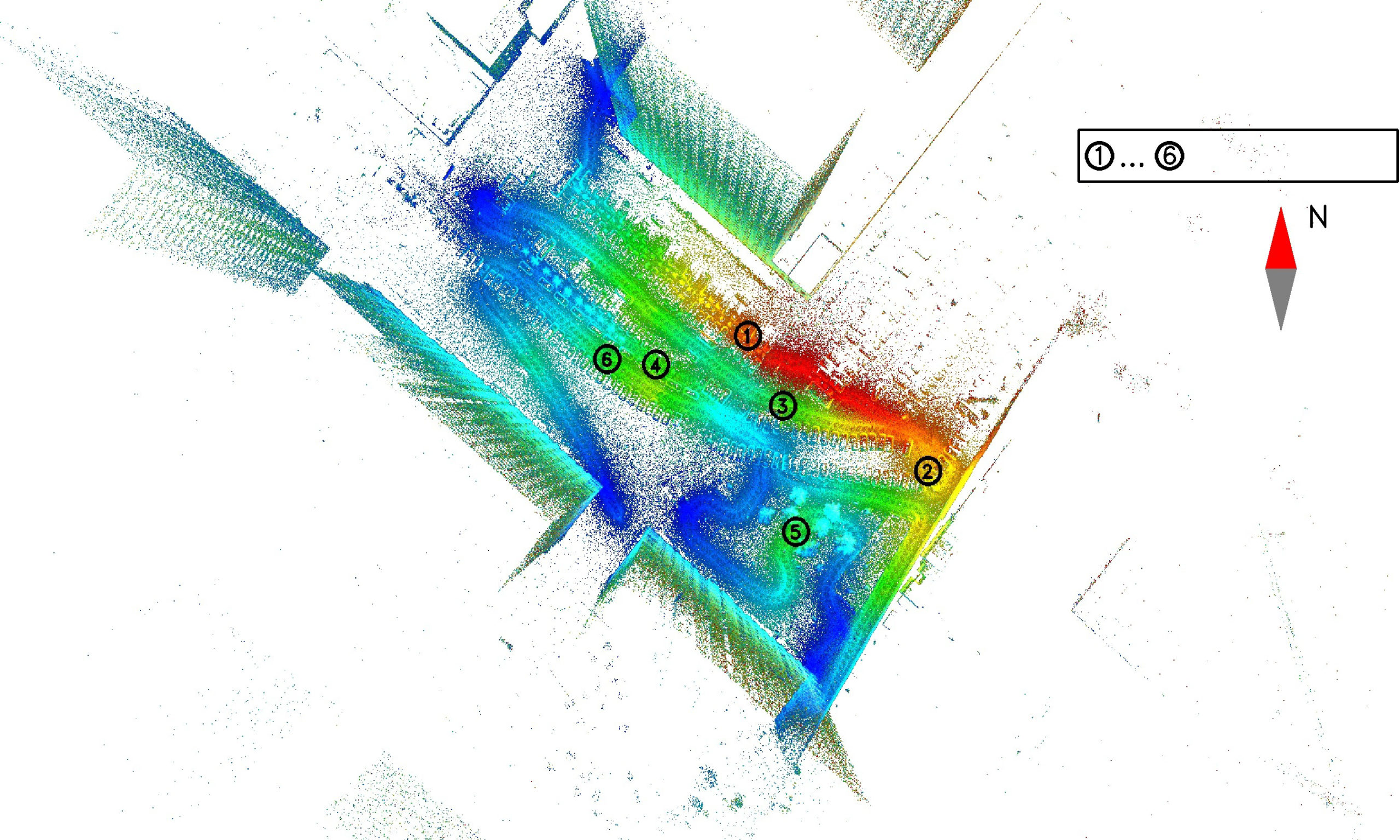
Траектория
В процессе обработки создаются LAS файлы не только объекта, но и траектории. Их можно использовать для анализа полевых работ
Траектория
Каждый цвет означает отдельный проход. Каждый проход привязывался к определённым опорным точкам. В итоге все 9 проходов получились в одной системе координат
Панорамные фотографии
Автоматически создаются панорамные изображения разрешением 5760 х 2880 пикселей. По умолчанию панорамы генерируются через 1 метр
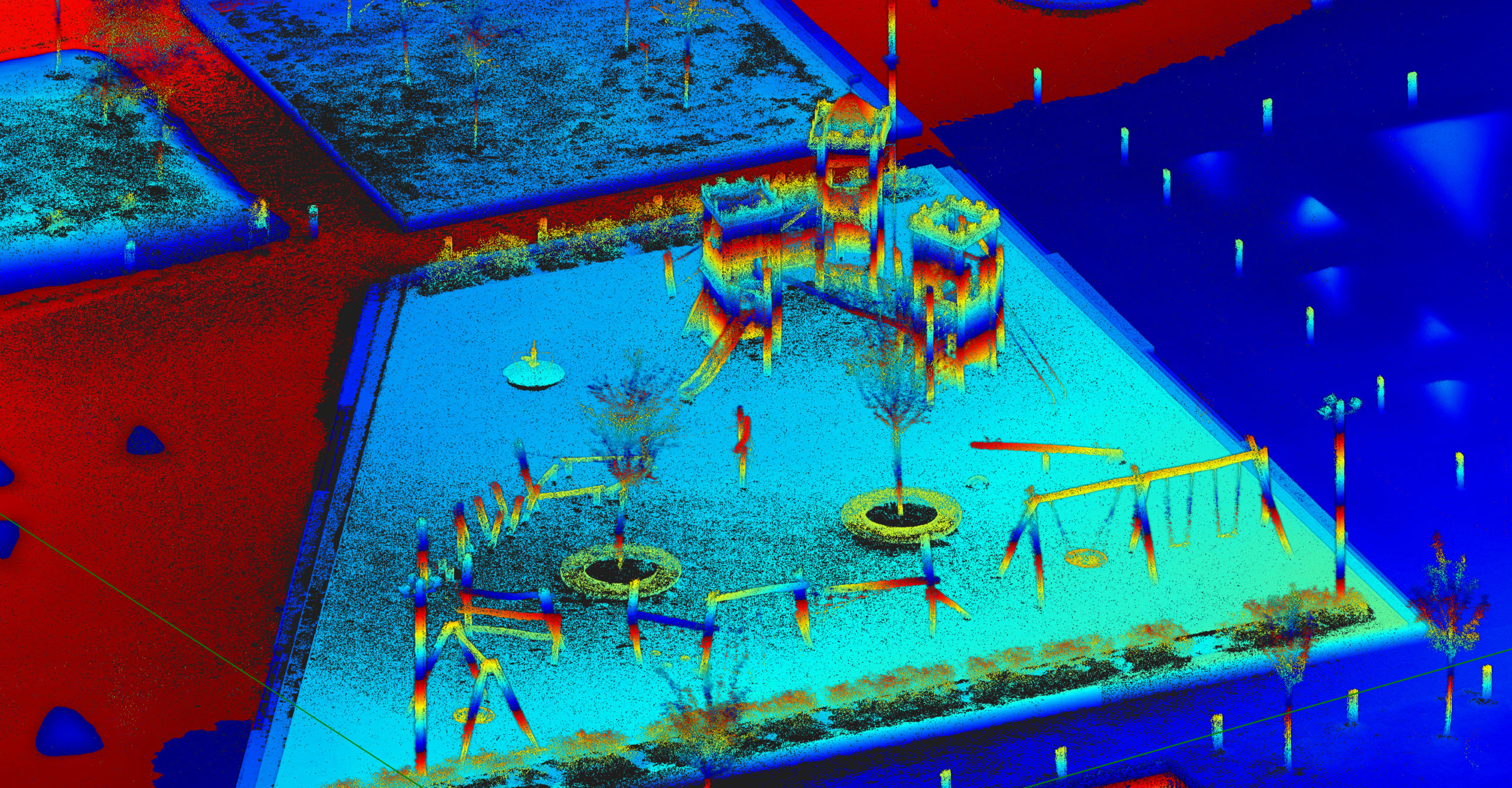
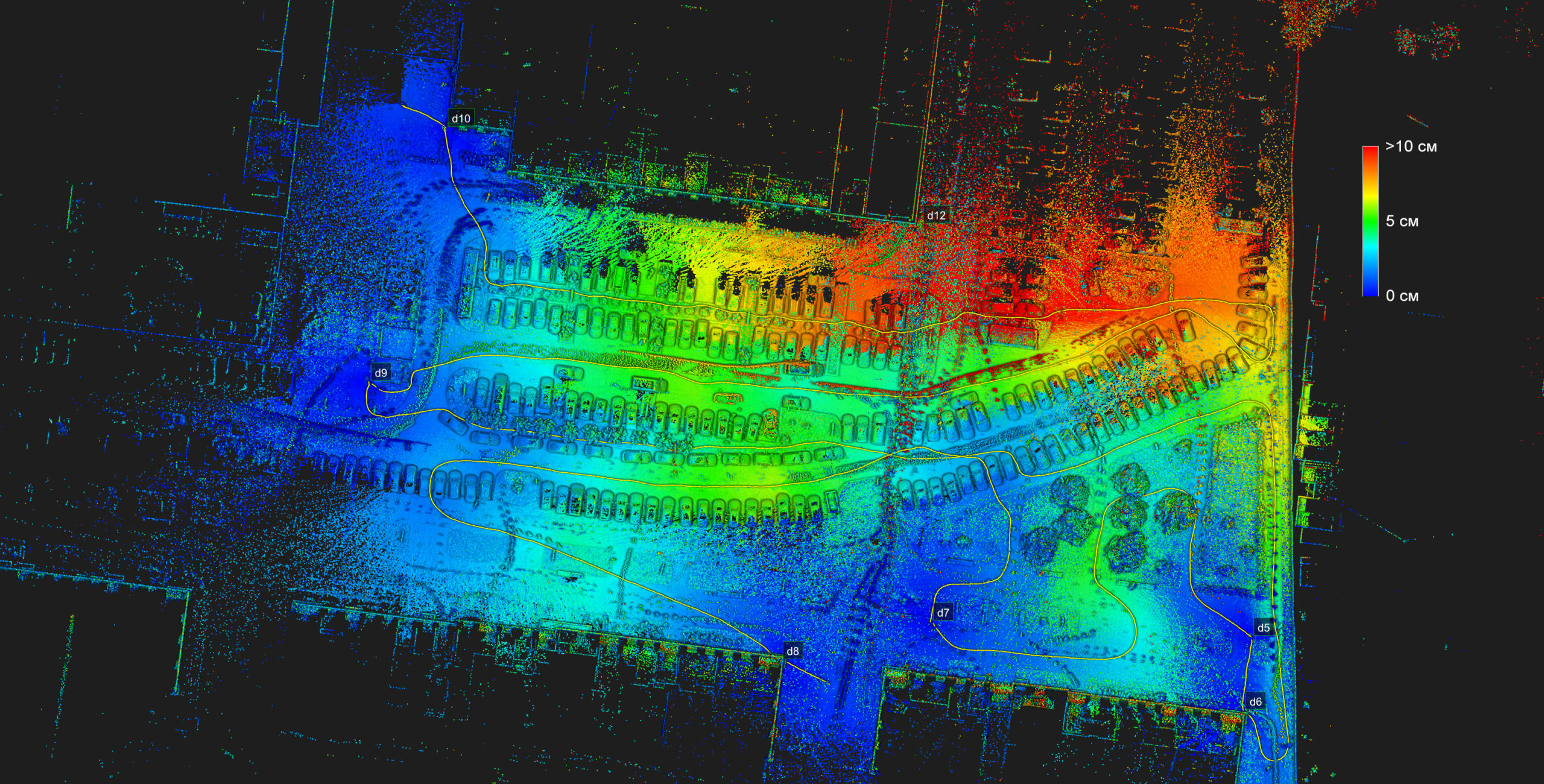
Оценка точности
Для каждого прохода программа по умолчанию создаёт LAS файл с раскраской по оценке точности.
Рекомендации
Для улучшения точности программа подскажет где и сколько нужно добавить опорных пунктов
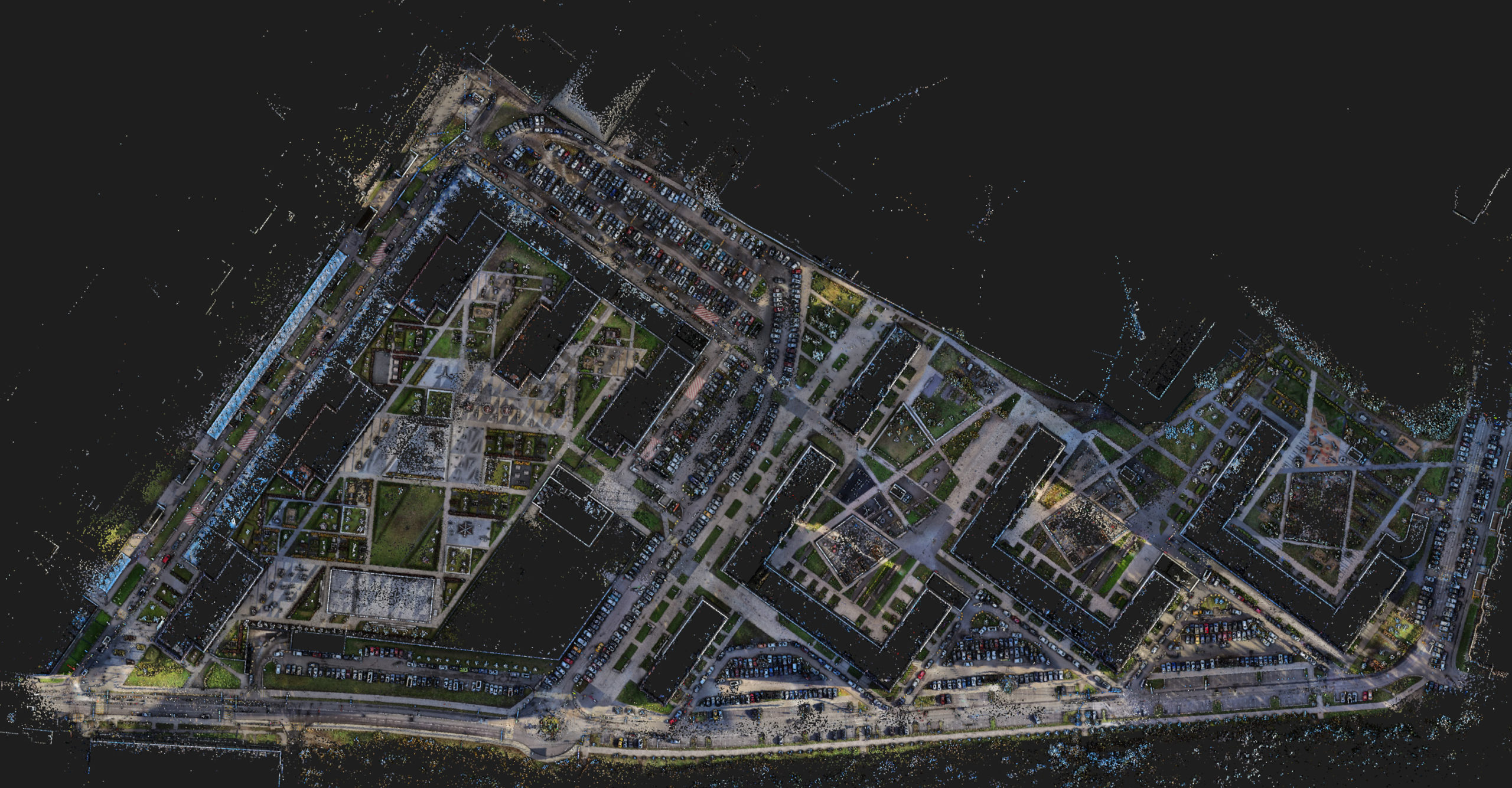
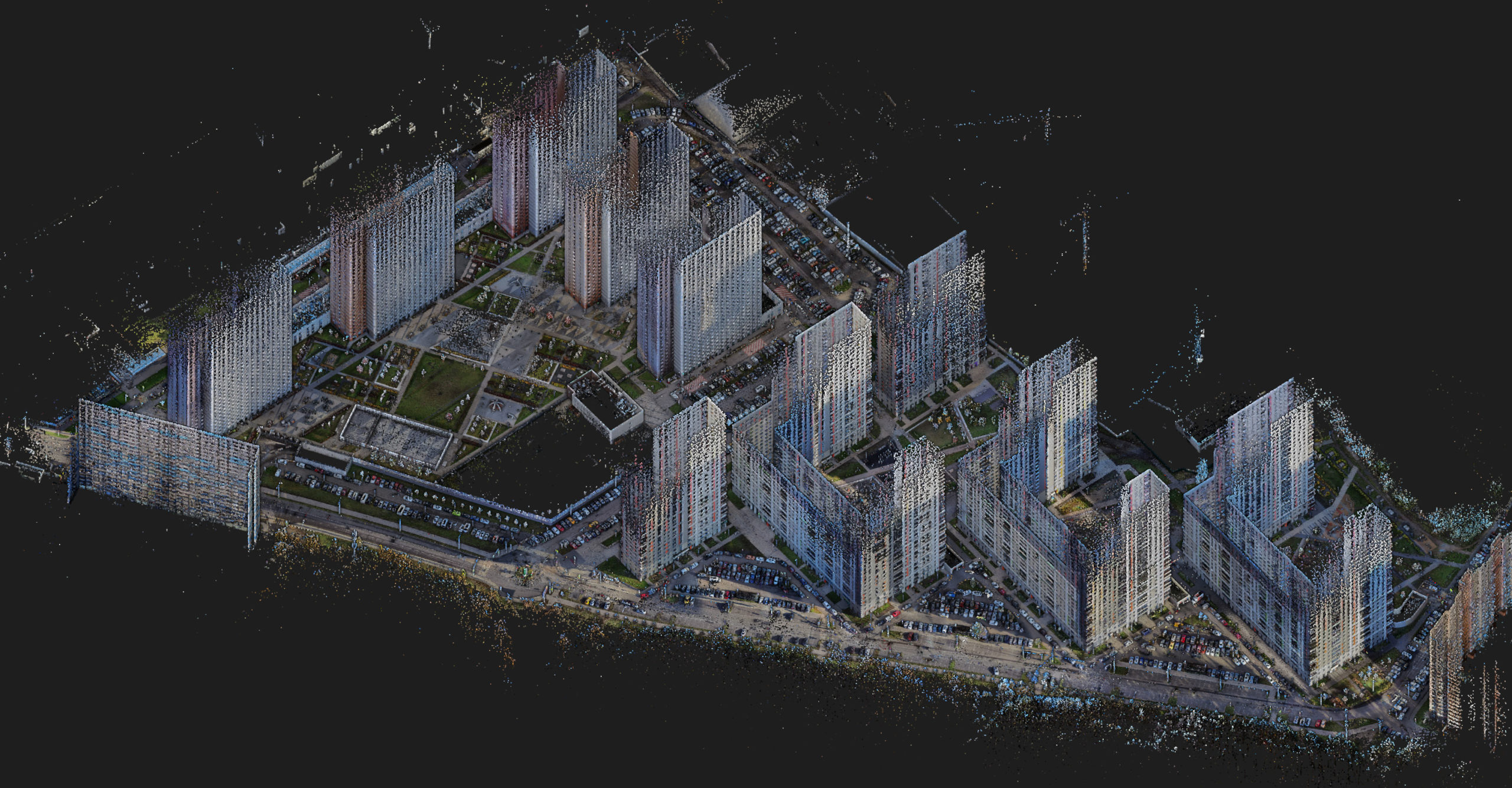
Легко читаемый текст
Большая плотность облака точек и реалистичная раскраска позволяют прочитать на облаке мелкий текст
Все фотографии проекта